Accelerometer Calibration
This article shows how to perform basic accelerometer calibration (usingMission Planner).
Note
1.After calibrating Accel, SHOULD REBOOT PIXHAWK and then take calibration of Level.
2.If place the wrong vehicle position,calibrate Accel failure, SHOULD REBOOT PIXHAWK and reconnect to calibrate it again.
Calibration steps
Under Initial Setup | Mandatory Hardware, select Accel Calibration from the left-side menu.

Mission Planner: Calibrate AccelerationClickCalibrate Accelto start the calibration.
If place the wrong vehicle position,calibrate Accel failure, SHOULD REBOOT PIXHAWK and reconnect to calibrate it again.
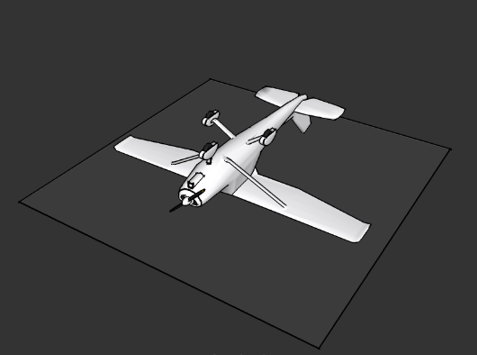
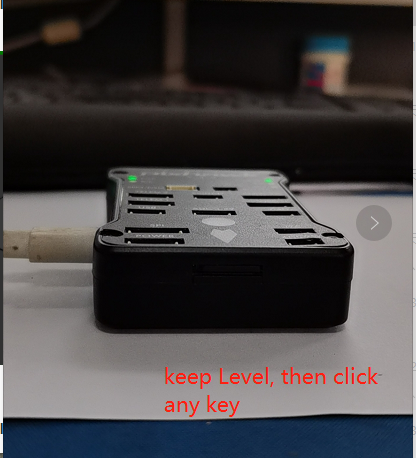
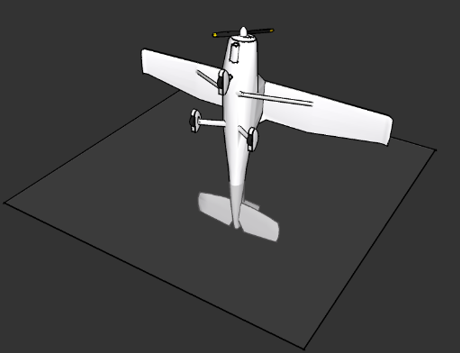
Place vehicle level (Keep PIXHAWK horizontal) and press any key,
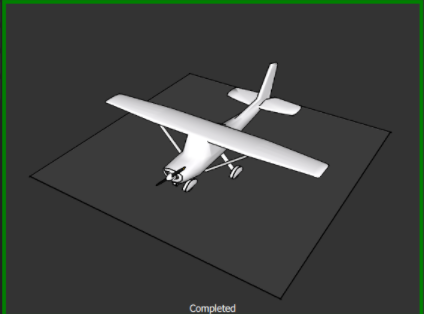
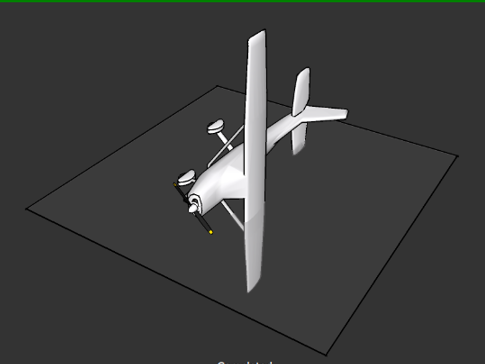
Place vehicle on its LEFT side and press any key to save setting

Place vehicle on its RIGHT side and press any key to save setting.

Place vehicle DOWN and press any key to save setting.
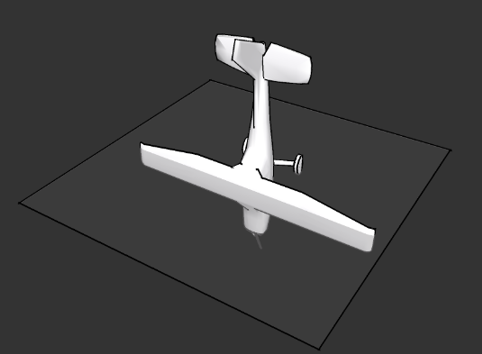

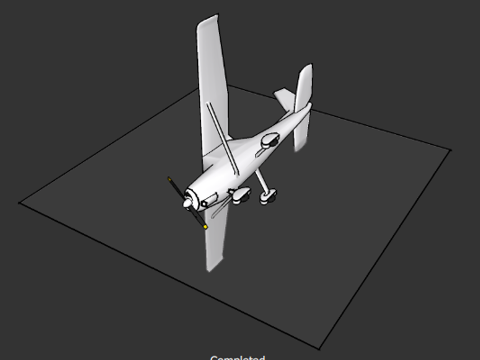
Place vehicle UP and press any key to save setting

Place vehicle on its BACK and press any key to save setting.